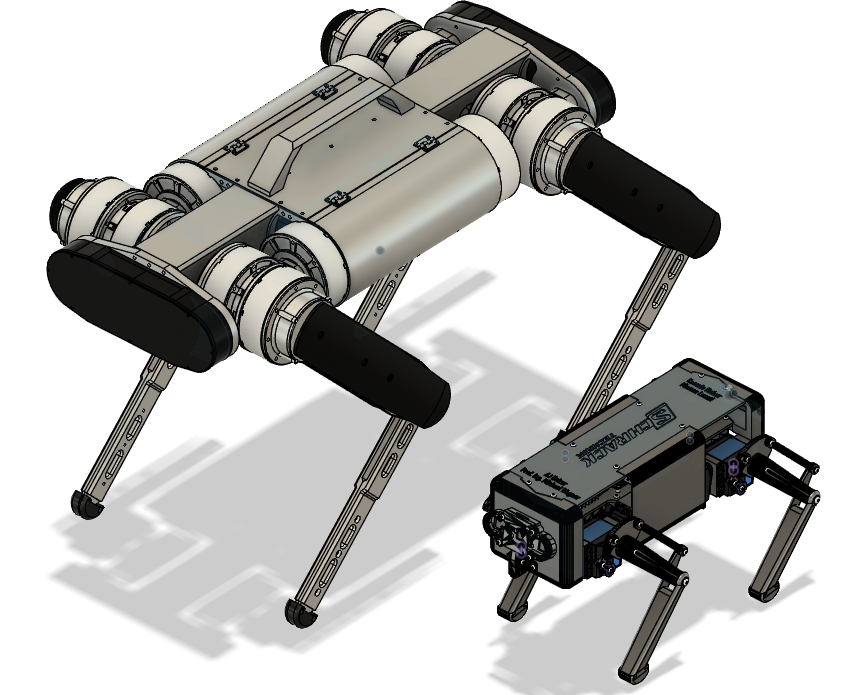
Debbie 2
Debbie 2 is the biggest and most complex project of mine up to date and the next evolution of my quadruped robot project, building on the foundation of the first prototype. Currently in the very early stages of development, Debbie 2 is planned to be significantly more robust, with improved mobility and control systems. This project is expected to be completed in mid to late 2029.