Debbie
Debbie is a quadruped robot designed for autonomous research in challenging environments such as abandoned or structurally unstable buildings. The project reflects my passion for robotics and electronics, combining mechanical design with intelligent control.
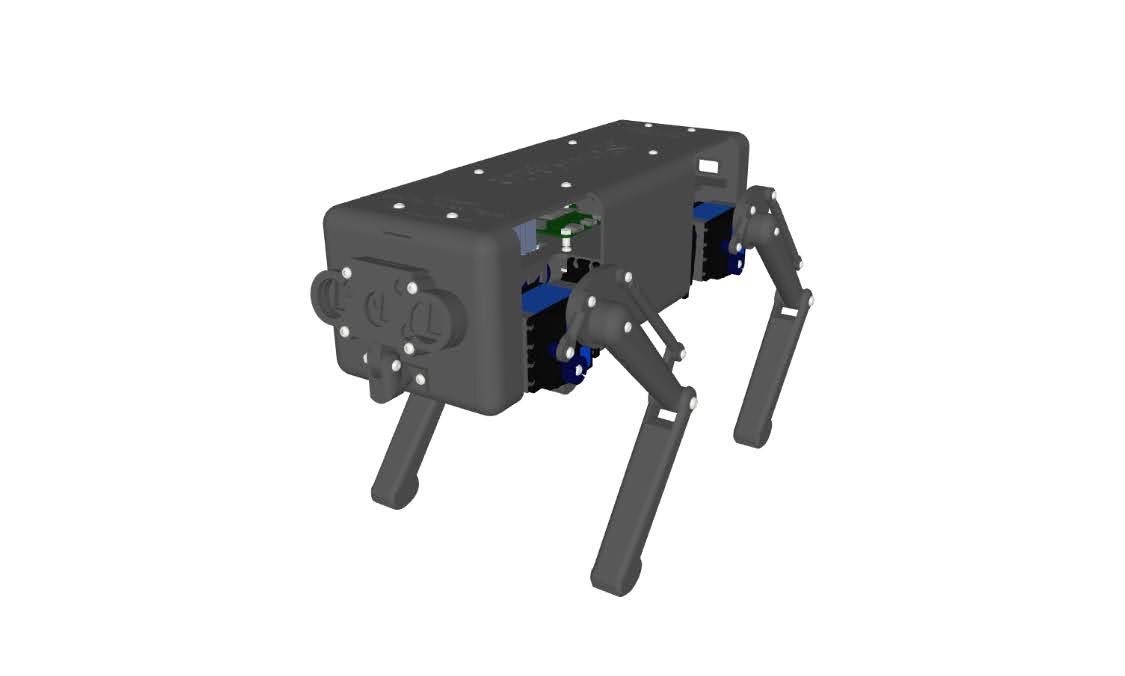
- Tech: Raspberry Pi, Fusion 360, Python, 3D Printing, Electronics
- Features: Autonomous navigation, robust chassis, remote control
- Status: Complete
Progress
100% Complete
Debbie's story
Debbie came to life for two reasons. The first was personal. Although the Austrian technical school system had dropped the tradition of a final project for technical schools, I still wanted to build one. Making it happen required more than just motivation, it required people. Michael Wagner, my professor at the time, took on the organizational groundwork that made the project possible in the first place. Schrack Technik GmbH provided the financial backing that gave it real legs. And my friend AJ Holzer brought the depth of knowledge that made the software actually work. Without any one of them, Debbie would not exist. The second reason was experience. I wanted to know what it feels like to work on a real project, with a real deadline, real responsibilities, and real pressure. I handled the organizational side, the hardware design, and contributed where I could on the software front. AJ's mastery of Python carried the software across the finish line. That combination of shared ownership and individual accountability was, in hindsight, the most valuable part of the whole endeavor.